Investigadores crean robots ciempiés que pueden salvar a las personas de los escombros del terremoto
3 min readUn equipo de investigadores del Instituto de Tecnología de Georgia en los Estados Unidos ha creado una serie de robots inspirados en ciempiés. Cada robot tiene un número diferente de patas para ver cuáles funcionan mejor en superficies difíciles. Algún día podrían usarse para llevar ayuda a áreas afectadas por desastres como terremotos.
Los ciempiés son artrópodos primitivos, emparentados con los insectos. Su nombre significa literalmente “cien patas” y, de hecho, algunos de ellos tienen casi 100 patas. Se identifican por su cuerpo largo y segmentado, cada segmento tiene un par de patas. Los ciempiés son depredadores y se alimentan de cualquier pequeño organismo rastrero que puedan atrapar. También son bastante capaces de navegar en entornos específicos.
Mientras que el movimiento humano está dominado por la inercia, los ciempiés no lo están, explicó Daniel Goldman, uno de los investigadores detrás de los robots, en un comunicado. “Si dejan de mover las partes del cuerpo y las extremidades, dejan de moverse al instante”, dijo Goleman. “Habitan en un mundo muy diferente de nuestro mundo de movimiento”.
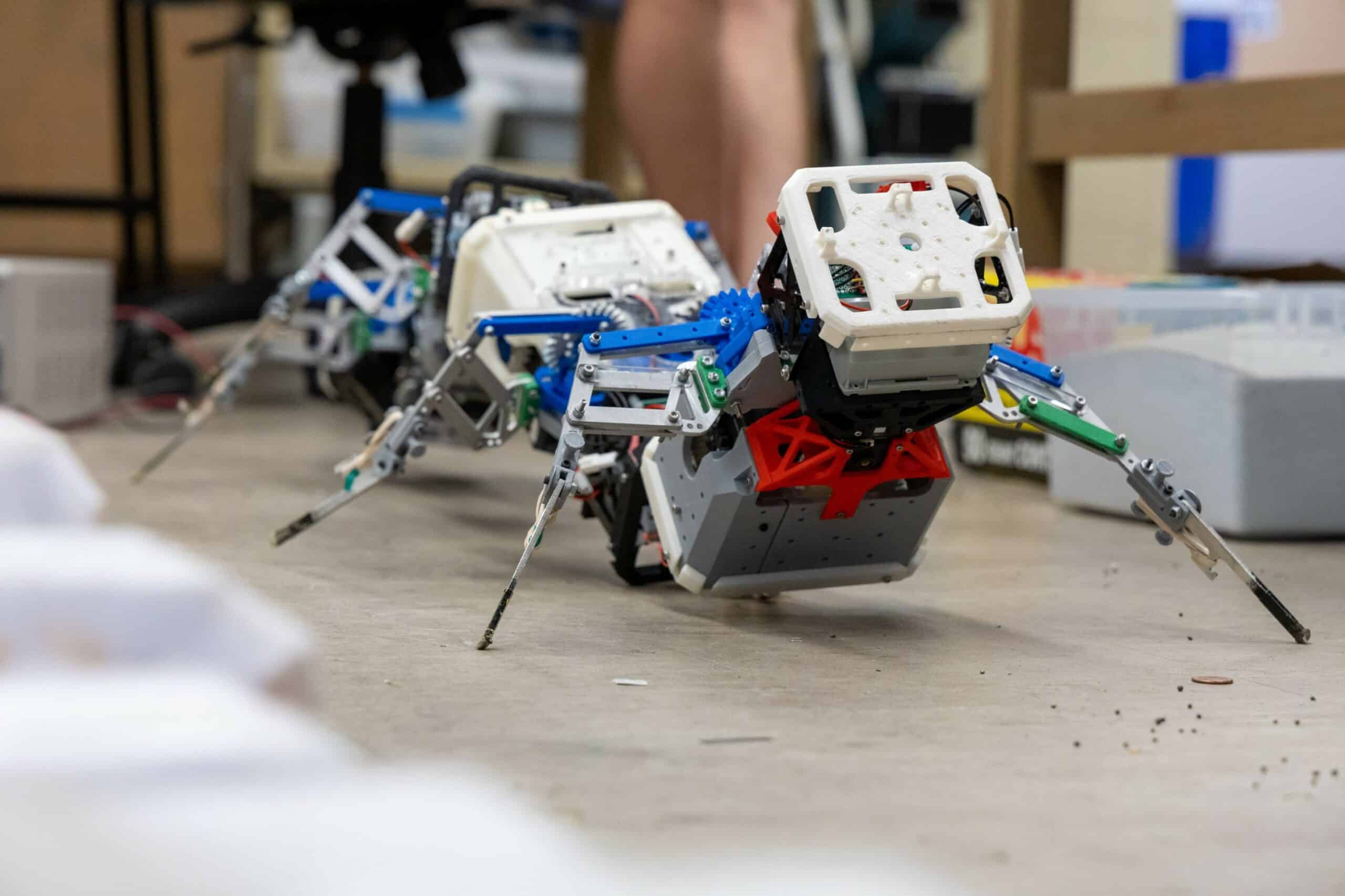
Robots inspirados en ciempiés
Goldman y un equipo de físicos, ingenieros y matemáticos querían averiguar si las muchas extremidades de un ciempiés podrían ser útiles para la locomoción. Crearon una nueva teoría de la locomoción de múltiples patas e hicieron un conjunto de modelos robóticos, que podían moverse sobre superficies irregulares sin ninguna tecnología adicional de detección o control.
Fueron inspirados por Claude Shannon, un matemático, quien ideó una teoría que demuestra cómo transmitir señales de manera confiable a distancia. La teoría sugiere que una forma de garantizar que un mensaje llegue del punto A al punto B en una línea ruidosa es no enviarlo como una señal analógica, sino dividirlo en unidades, números discretos.
En la misma línea, agregar más piernas y dividir la distancia a cubrir en unidades más pequeñas (para más piernas) parecía una buena idea.
Los investigadores propusieron que agregar pares de patas al robot podría aumentar su capacidad para moverse con fuerza sobre superficies difíciles, un concepto que llaman redundancia espacial. Si una pierna falla, la abundancia de piernas la mantiene en movimiento de todos modos. De hecho, el robot se convierte entonces en un sistema muy fiable para transportarse de A a B en terrenos difíciles.
“Con un robot bípedo avanzado, generalmente se necesitan muchos sensores para controlarlo en tiempo real”, dijo el miembro del equipo Baxi Chong en un comunicado. “Pero en aplicaciones como búsqueda y rescate, exploración de Marte o incluso micro-robots, existe la necesidad de pilotar un robot con detección limitada. Hay muchas razones para una iniciativa sin sensores”.
Para probar esto, los investigadores crearon terrenos para imitar un entorno natural inconsistente. Luego probaron el robot agregando más patas dos cada vez, comenzando con seis y aumentando a 16. A medida que aumentaba la cantidad de patas, el robot podía moverse más ágilmente por el terreno. Eventualmente, probaron el robot en terreno real y los resultados fueron los mismos.
El equipo ya está aplicando sus hallazgos a la agricultura. Goldman ha creado una empresa que quiere usar robots para desyerbar tierras de cultivo donde los herbicidas no son efectivos. Mientras tanto, también están trabajando en refinar el robot. Quieren determinar el número óptimo de piernas de una manera que sea rentable y al mismo tiempo mantenga los beneficios.
“En este artículo, preguntamos: ‘¿Cómo predice el número mínimo de piernas para realizar tales tareas?’ dijo Chong. “Actualmente solo probamos que existe el número mínimo, pero no sabemos el número exacto de patas necesarias. Además, necesitamos comprender mejor el equilibrio entre energía, velocidad, potencia y robustez en un sistema tan complejo.
El estudio fue publicado en el revista de ciencia

“Increíble aficionado a la música. Estudiante. Empollón empedernido del café. Jugador. Especialista web aficionado. Pionero malvado de la cultura pop”.


